详情
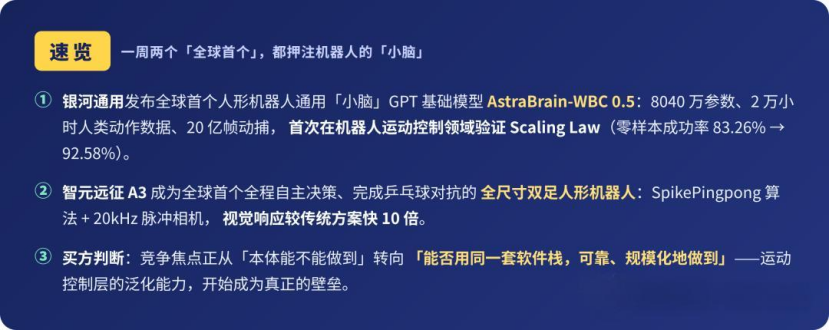
近日,银河通用发布全球首个人形机器人全身实时运动控制通用小脑模型AstraBrain-WBC 0.5,采用GPT式因果Transformer架构,将全身多自由度控制转化为序列预测任务;模型8040万参数,推理延迟仅0.39ms,数据规模从200万帧扩至20亿帧后,零样本任务成功率升至92.58%,相关论文《Humanoid-GPT》获CVPR2026 收录并开源。同期智元远征A3完成全球首个全自主乒乓球对抗,应对最高5米/秒高速来球,搭载20kHz高频脉冲相机实现毫米级击球预判,全程无遥控、无预设脚本完成感知、规划、击球闭环。两项突破均聚焦运动控制底层技术,前者打造通用可跨硬件迁移的运控基础模型,后者完成高动态场景感知控制一体化验证。
我院认为,这次成果首次将GPT序列预测思路引入全身运动控制,证实运控领域存在缩放定律,为通用机器人算法开辟全新技术路线;此外有助于降低中小企业、科研机构研发门槛,助力行业整体技术进步。同时我们客观理性看待当前阶段:现阶段小脑模型仅实现运动追踪,尚未对接视觉语言VLA模型,完整通用智能仍需迭代。
广东具备完备机器人产业链、丰富制造业场景与科创资源,本次技术突破带来多重发展启示。一是聚力底层算法研发,依托深圳科创载体引进通用运控开源生态,培育本土运控模型研发企业,补齐算法底座短板;二是依托省内海量工厂、服务场景搭建测试平台,积累本土实景数据,持续优化小脑模型泛化能力;三是深化深佛莞产业协同,推动算法企业与本地零部件、整机厂商联合攻关,平衡运控性能与制造成本,加快人形机器人在智能制造、民生服务场景落地,构建软硬协同的特色产业优势。